-Què és Scratch |

|
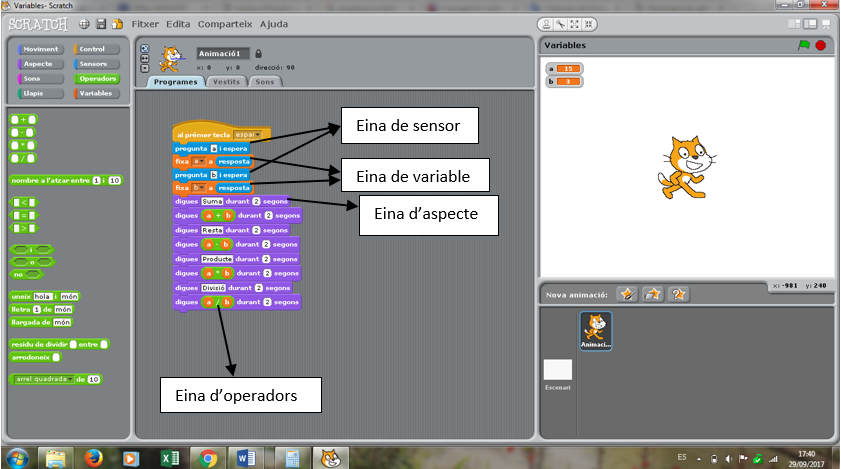
--Des del meu punt de vista, és un programa o eina lliure i de software gratuït que serveix per programar des de diferents objectius.
-És un projecte educatiu de llenguatge de programació creat al Mit Media Lab. Aleshores, Scratch està basat en el llenguatge de programació Logo i serveix per aprendre a programar mitjançant reptes i l'experimentació i introduir d'aquesta manera el pensament computacional:
-La seva interfície és senzilla i permet tant crear històries interactives, tutorials, jocs i animacions, com compartir els projectes amb altres usuaris en línia.
-Els reptes poden ser de temàtica variada, es poden adaptar i orientar a diferents àmbits i objectius.
-Entorn col·laboratiu virtual que permet compartir els projectes a través de la web.
-Disponible per diversos sistemes operatius.
-És multillenguatge.
-Programes que vam realitzar:
1.Dibuix de polígons de 4 i 6 costats.
2. Ús del Bucle.
3. Variables.
4. Condicionals.
5. Equació de 2on grau.
6. Pong
1.Dibuix de polígons de 4 i 6 costats.
2. Ús del Bucle.
3. Variables.
4. Condicionals.
5. Equació de 2on grau.
6. Pong
-Variables.
-Mbot.
-Descripció del robot Mbot:
El robot Mbot és el kit de robòtica ideal perquè els nens s'inciïn en la robòtica, programació i electrònica basat en Arduino i Scratch. Concretament, té una mida rectangular, es pot connectar a l'ordinador a través d'un cable o un llapis de memòria que ja ve en el kit. A més a més, disposa de 4 buits per connectar cables que venen de diferents sensors. Inclòs, se li pot introduir una pantalla i disposa d'un comandament a distància per controlar-lo des de qualsevol lloc.
El robot Mbot és el kit de robòtica ideal perquè els nens s'inciïn en la robòtica, programació i electrònica basat en Arduino i Scratch. Concretament, té una mida rectangular, es pot connectar a l'ordinador a través d'un cable o un llapis de memòria que ja ve en el kit. A més a més, disposa de 4 buits per connectar cables que venen de diferents sensors. Inclòs, se li pot introduir una pantalla i disposa d'un comandament a distància per controlar-lo des de qualsevol lloc.

|
-Què és Arduino?
És una plataforma electrònica basat en el microcontrolador de codi obert, que alhora, està basat en el maquinari i programari fàcil d'utilitzar. Els taulers d'Arduino tenen la capacitat de llegir entrades: encendre un sensor, un dit amb un botó o un missatge de Twitter i, en conseqüència, desenvolupar una resposta: activar el motor, encendre un LED i publicar alguna cosa en línia. |
|

|
-Reptes amb Mbot
|
Repte 4: Comandament
En aquest repte, havíem de realitzar primerament un programa en el qual el robot es mogués controlat per una sèrie de tecles del comandament i aplicar-ho. Concretament, si pressionàvem la tecla avança llavors havia d'avançar, si era tecla gira cap la dreta aleshores havia de girar cap a la dreta, si era cap a l'esquerra doncs cap a l'esquerra, si era retrocedir per tant havia de retrocedir. A més a més, si es pressionava la tecla A, s'havia d'aturar. Finalment, si detectava un objecte més petit que 20, havia d'aturar-se i emetre un so. |
Repte 6: Compte enrere
En aquest repte, havíem d'aconseguir que la pantalla del robot Mbot mostrés un compte enrere des del 10. |
|
|
|
-Repte: Teclat virtual
En aquest repte, el robot havia estat programat perquè si detectés un objecte a una certa distància, havia de sonar nota concreta. I per fer-ho exactament, vam crear una espècie de taula mesurada on cada espai concret havia de tocar una nota concreta.
En aquest repte, el robot havia estat programat perquè si detectés un objecte a una certa distància, havia de sonar nota concreta. I per fer-ho exactament, vam crear una espècie de taula mesurada on cada espai concret havia de tocar una nota concreta.
-Repte: ROMA 2
-Explicació del repte.
En aquest repte, el nostre robot havia de partir de la sortida passant per la Torre de Defensa i parar fins a prop de la capsa. Tot seguit, havia de girar per anar directament cap al Mercat i, des d'allà, havia de seguir la línia negra que feia un circuit i sense sortir-ne fins al arribar al final.
-Explicació programació.
En primer lloc, el que vam decidir és no utilitzar el sensor de distància per qüestions de preferència, en lloc d'aquest, vam usar el cronòmetre. Aleshores, vàrem calcular els segons que tardava en arribar prop de la capsa més o menys en línia recta. Tot seguit, vam calcular el temps que tardava en girar. Després, el vam programar perquè anés en línia recta al Mercat. Finalment, vam activar el sensor de seguidor de línies perquè fes el circuit fins al final.
-Vídeo o fotos.
En aquest repte, el nostre robot havia de partir de la sortida passant per la Torre de Defensa i parar fins a prop de la capsa. Tot seguit, havia de girar per anar directament cap al Mercat i, des d'allà, havia de seguir la línia negra que feia un circuit i sense sortir-ne fins al arribar al final.
-Explicació programació.
En primer lloc, el que vam decidir és no utilitzar el sensor de distància per qüestions de preferència, en lloc d'aquest, vam usar el cronòmetre. Aleshores, vàrem calcular els segons que tardava en arribar prop de la capsa més o menys en línia recta. Tot seguit, vam calcular el temps que tardava en girar. Després, el vam programar perquè anés en línia recta al Mercat. Finalment, vam activar el sensor de seguidor de línies perquè fes el circuit fins al final.
-Vídeo o fotos.
